
緊急情報
ホーム > 市政全般 > 計画・行革・財政・統計等 > 施策・計画 > 国家戦略特区 > 自動運転モビリティの導入
更新日:2024年4月1日
ここから本文です。
自動運転モビリティの導入
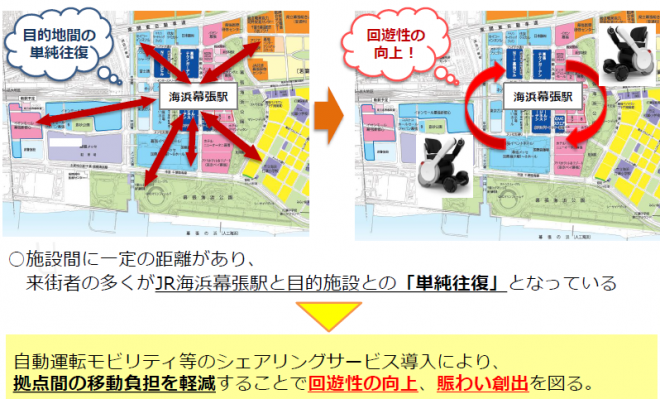
幕張新都心のゆとりある道路空間において『自動運転モビリティ』を導入することで、拠点間の移動の負担を軽減し、回遊性の向上、賑わいの創出を目指しています。
パーソナルモビリティのシェアリングサービス
パーソナルモビリティとは
定義
パーソナルモビリティとは「一人乗りの移動機器」のことを指します。歩行と既存移動体との間を補完するツールであり、人が移動する際の一人当たりのエネルギー消費を抑制するという意図のもとに、従来の自動車と一線を画した移動体として提案されています。なお、本市が想定するパーソナルモビリティは、道路交通法上の電動車いすの基準(道路交通法施行規則第1条の4)を満たすもので、障害物回避や自動走行、他の移動サービスとの連携を可能とした次世代型のモビリティで歩行者領域を走行するものです。
(パーソナルモビリティの例)

【画像左から】株式会社WHILLが開発する「WHILL(ウィル)」ModelA/C、株式会社アイシンが開発する「ILY-Ai(アイリーエーアイ)」
千葉市が掲げる構想
幕張新都心内の歩道空間を活用し、アプリ等での呼び出し、目的地までの自動走行、乗り捨て後の無人回収等の新たな技術を搭載したパーソナルモビリティシェアリングサービスの実現を目指しています。
法規制
道路交通法上の電動車いすは、歩道での無人走行に関するルールが整備されていないため、本市の目指す次世代型パーソナルモビリティを活用したシェアリングサービスの実現に向け、国に対し、無人走行等の新たなルールの整備を求めていきます。
現在の検討進捗状況
自律走行ロボット実証実験(2016年度)
千葉大学(大学院工学研究院:大川一也准教授)と連携し、小型の自律走行ロボットを活用した実証実験を幕張新都心にて実施しました。
|
実施日時 |
2017年1月17日~2018年3月31日 |
|
実施場所 |
幕張新都心全域 |
|
実施内容 |
歩道の形状、歩行者の動態状況等の把握調査、走行速度による自己及び周囲への影響確認
|
|---|---|
|
走行実績 |
|
主な実施内容
|
|
|
|
|
|
|
|
|
|




千葉市・大学等共同研究事業報告書
2017年度は「千葉市・大学等共同研究事業(※)」を活用し、実証実験を行いました。
(※)本市が抱える行政課題について、大学等職員と市職員が共同で研究を行う事業です。
パーソナルモビリティ試乗体験(2017年度)
パーソナルモビリティの「移動支援」から『移動手段』へのイメージ転換、利用ニーズの把握、地域への認知度向上や市民理解の醸成を目的として、WHILL(ウィル)株式会社協力のもと、イオンモール幕張新都心にて一般の方々を対象としたパーソナルモビリティの試乗体験ツアーを開催しました。
|
実施日時 |
2017年8月6日 |
|
実施場所 |
イオンモール幕張新都心 |
|
実施内容 |
【走行ルート概要】
【走行方法】
|
|
安全対策 |
|
試乗体験の様子

【家族連れや友人同士、カップルなど様々な方が試乗】
「WorldRobotSummit2018」実証サイト展示(2018年度)
WRS2018の展示会の一環として、公募により採択を受けた自治体がロボットの社会実装に関する先進的事例を地域で展示しました。
千葉市は幕張新都心エリアにおいて、一般客を対象とした試乗体験イベント及び近未来技術展示を実施しました。
|
実施日時 |
2018年10月18日、19日 |
|
実施場所 |
幕張メッセ2階中央エントランス前 |
|
実施内容 |
WHILL試乗体験イベント
近未来技術展示
|
実証サイト展示の様子
|
【「WHILL」試乗体験イベント】 |
|
|
|



パーソナルモビリティ屋内無人走行実証実験(2019年度)
パーソナルモビリティ社会実装サポート事業を活用し、株式会社NTTドコモ(技術協力:株式会社アイシン、千葉大学)が次世代型パーソナルモビリティ「ILY-Ai」によるショッピングモール(屋内)での無人走行の実証実験を実施しました。
|
実施日時 |
2019年12月10日~12日 |
|
実施場所 |
イオンモール幕張新都心 |
|
実施内容 |
|
※その他、WHILLを活用した市民向け個宅リースや来街者向けシェアリングサービスを実施
実証実験の様子


(2)AI運行バス実証実験
|
実施日時 |
2020年11月21日~12月20日 各日10時~21時 |
|
実施内容 |
幕張新都心エリアにて、利用者の予約に応じて、AIが最適な運行計画を作成するオンデマンドバスを実施(無料) |
|
乗降場所 |
幕張新都心エリア内に24か所設置(詳細はこちら(PDF:637KB)) |
パーソナルモビリティシェアリング&公道自律走行技術実証実験(2021年度)
(1)シェアリングサービス実証実験
|
実施日時 |
2022年2月4日~7日、11日~14日 各日10時~17時 |
|---|---|
|
実施場所 |
イオンモール幕張新都心グランドモール |
|
実施内容 |
|

(2)公道自律走行実証実験
|
実施日時 |
2022年2月21日 |
|---|---|
|
実施場所 |
JR海浜幕張駅前ペデストリアンデッキ |
|
実施内容 |
|
パーソナルモビリティに関する意識調査
試乗体験者に対するアンケート
(1)WHILL試乗体験ツアー参加者へのアンケート(2017年8月)
⇒集計結果(PDF:185KB)
(2)WRS2018実証サイト展示での試乗体験イベント参加者へのアンケート(2018年10月)
WEBアンケート
広報広聴課が実施するWEBアンケート(※)により、パーソナルモビリティのシェアリングサービスに関する意識調査を実施しました(2017年7月)。
⇒集計結果(PDF:570KB)
(※)市ホームページを通して市内にお住まいの方々を対象にアンケート調査を実施することにより、短期間で精度の高い市民意見等を把握し、施策等の検討に役立てる制度です。
パーソナルモビリティ社会実装サポート事業
都市の回遊性の向上やラストワンマイルの課題解決、交流人口の増加による街全体の賑わいの創出等を目的として、歩道空間の走行を中心としたパーソナルモビリティと先端的なIoT技術等を組み合わせた新たなモビリティサービスの社会実装に向けた事業化を一層加速させるため、サービス実証や技術実証を実施する民間事業者等を公募型プロポーザル方式により募集します。
企画提案参加申込について
プロポーザルに参加を希望する事業者は、プロポーザル実施要領等を熟読のうえ必要書類を揃え、期日までに参加申込みを行ってください。
プロポーザル実施要領及び補助金交付要綱
参加申込書類
- 企画提案参加申込書(様式第1号)(ワード:24KB)
- 誓約書(様式第2号)(ワード:20KB)
- 会社概要書及び業務実績調書(様式第3号)(ワード:23KB)
- 予算計画書(経費内訳書)※任意書式
- 企画提案概要書(様式第4号)(ワード:25KB)
- 企画提案書 ※任意書式
- 共同企業体等一覧表(様式第5号)(ワード:54KB)
- 委任状(共同企業体等)(様式第6号)(ワード:55KB)
※各書類の必要部数等の詳細は、プロポーザル実施要領にてご確認ください。
提出期限
令和4年9月5日(月曜日)午後5時 ※郵便の場合は締切日必着
提出場所
千葉市総合政策局未来都市戦略部国家戦略特区推進課(〒260-8722 千葉市中央区千葉港1-1)
質問及び回答について
プロポーザル実施要領等の内容について不明な点がある場合は、下記のとおり質問を受け付けます。
(1)受付期限 令和4年8月26日(金曜日)正午
(2)質問方法 電子メールアドレス(tokku.POF@city.chiba.lg.jp)宛てに質問書(ワード:16KB)を提出(電話・口頭・FAXでの質問は受け付けていません)
(3)回 答 令和4年8月29日(月曜日)午後5時までに本ホームページに掲載します。
※質問の内容により、事業者選定の公平性を保てない場合には、回答しないことがありますので予めご了承ください。
審査結果について
自動運転車
自動運転車公道実証実験
県内初となる公道での自動運転車実証実験を実施しました。
バス・タクシーなどの交通事業者や幕張新都心の企業の代表者など、多くの方々に体験していただきました。
|
実施日時 |
2018年5月23日、24日 |
|
実施主体 |
千葉市、イオン株式会社、国立大学法人群馬大学 |
|
走行ルート |
幕張メッセ~イオンモール幕張新都心 |
|
走行車両 |
トヨタアルファード(ATH20W)ベース自動運転車両1台 |
|
その他 |
|
実証実験の様子

【「メッセ大通り」を走行する自動運転車両】
CEATEC2019における自動走行バスの公道実証実験
県内初となるハンドルのない自動走行バスの公道での自動運転車実証実験を実施しました。
300名を超えるCEATEC2019来場者の方々に体験していただきました。
|
実施日時 |
2019年10月15日~18日 |
|
実施主体 |
千葉市、CEATEC実施協議会、SBドライブ株式会社 |
|
走行ルート |
幕張メッセ国際展示場発着の周回コース(約1.5km) |
|
走行車両 |
NAVYA ARMA(仏NAVYA社製)1台 |
|
その他 |
|
実証実験の様子

【CEATEC2019来場者を乗せて走行する自動走行バス(ARMA)】
自動運転バス公道実証実験
地域の交通事業者、企業と共同により、公道での自動運転バス実証実験を実施しました。
|
実施日時 |
2020年3月23日~27日 |
|
実施主体 |
千葉市、京成電鉄株式会社、京成バス株式会社、イオン株式会社、イオンコンパス株式会社、国立大学法人群馬大学(技術協力) |
|
走行ルート |
イオンモール幕張新都心の周回コース(約1.6km) |
|
走行車両 |
日野 ロングボデーベース 1台 |
|
その他 |
※自動運転時に運転席に搭乗する者 |
実証実験の様子

【地域のバス事業者の運転士が運転席に搭乗し走行する自動運転バス】
その他
自動運転モビリティを活用したオンライン動物園(千葉市動物公園)
新型コロナウイルス感染症拡大防止のための政府による緊急事態宣言を受け、臨時休園中の千葉市動物公園内の様子を自動運転モビリティ「ラクロ」に搭載した360度カメラを使用し、自動走行や遠隔操縦によりライブ配信する「オンライン動物園」を開催しました。
|
実施日時 |
2020年5月17日 1回目 10時00分~11時00分 2回目 13時00分~15時00分 |
|
実施場所 |
千葉市動物公園(平原ゾーン) |
|
実施内容 |
・特設サイトにて360度カメラ映像と音声をライブ配信し、園内散策をバーチャル体験 |
実施状況
自動運転モビリティ体験会(千葉市動物公園)
次世代モビリティによる新たなサービスの事業化に向けた技術及びビジネスモデルの検証や、園内の新たな移動サービスや動物ガイドスタイルの構築に向けた有効性の検証を目的として、株式会社ZMP及び双日株式会社が千葉市動物公園で自動運転モビリティ「ラクロ」による体験会を実施しました。
|
実施日時 |
2021年6月3日~8日 ※6月4日、6月6日は雨天により中止 |
|
実施場所 |
千葉市動物公園(平原ゾーン) |
|
実施内容 |
・自動運転による園内周回体験(障害物検知の際は自動停止及び自動回避) |
体験会の様子


体験会の記録動画
このページの情報発信元
総合政策局未来都市戦略部国家戦略特区推進課
千葉市中央区千葉港1番1号 千葉市役所高層棟6階
電話:043-245-5346
ファックス:043-245-5551
より良いウェブサイトにするためにみなさまのご意見をお聞かせください